Robot Delta DD2-1000-P30
Caratteristica di u produttu
Caratteristica
1、U tempu di ciclu standard hè menu di 0.75s, scuntrà a vostra ricerca per a velocità massima è a carica massima.
2 、 Disegnu avanzatu di meccanismo parallelu doppiu planare, facenu chì u robot si muvimenti à alta velocità à pocu costu.
3 、 U robot hè ideale per a produzzione à alta velocità in l'industria alimentaria è medica.Ampiamente utilizatu in assemblea, manipulazione è pick-and-place di picculi materiali.
Parametri di u produttu
| Tipu | DD2-1000-P30 | |
| Assi | 2 | |
| Payload | 30 kg | |
| Manipulatore | Pesu | 60 kg |
| Diamitru | 1000 mm | |
| Ripetibilità | pusizioni | 0,05 mm |
| Rotazione | - - - | |
| Velocità massima | 250 pp/min | |
| Gamma di rotazione | - - - | |
| Momentu Massimu Permissibile di Inerzia | - - - | |
| Gamma d'angolo di bracciu attuatu | Up | 25º |
| Giù | 77º | |
| Alimentazione elettrica | Trifase 380VAC -10%~+10%, 49~61HZ | |
| Capacità di putenza | 10 KVA | |
| Potenza nominale | 6 kw | |
| Temperature di almacenamiento | -10 ℃ ~ 70 ℃ | |
| Ambiente di travagliu | -10℃~50℃,RH≤80% | |
| Prutezzione | IP55 | |
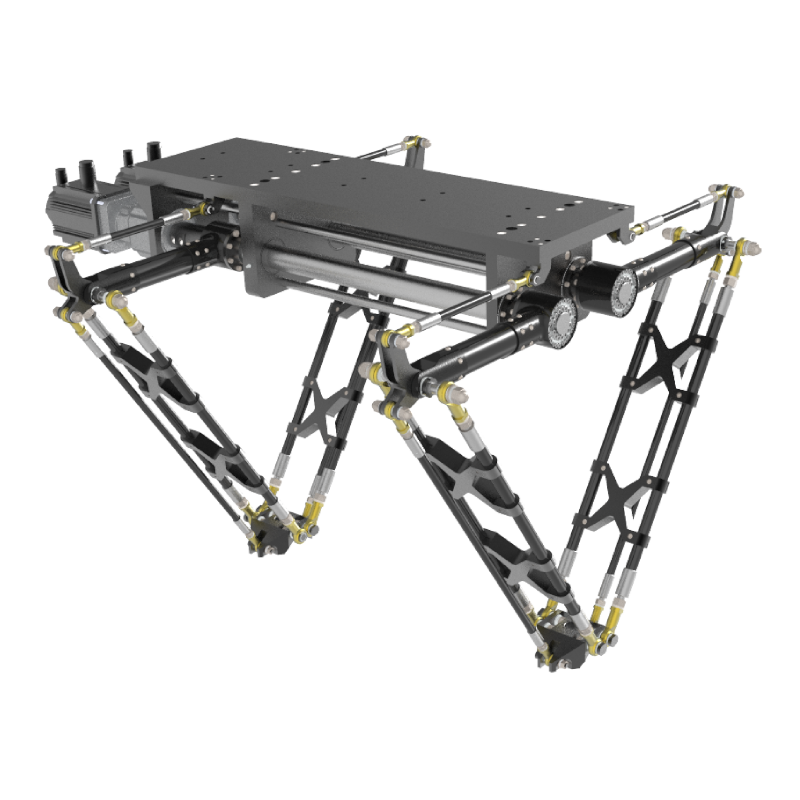
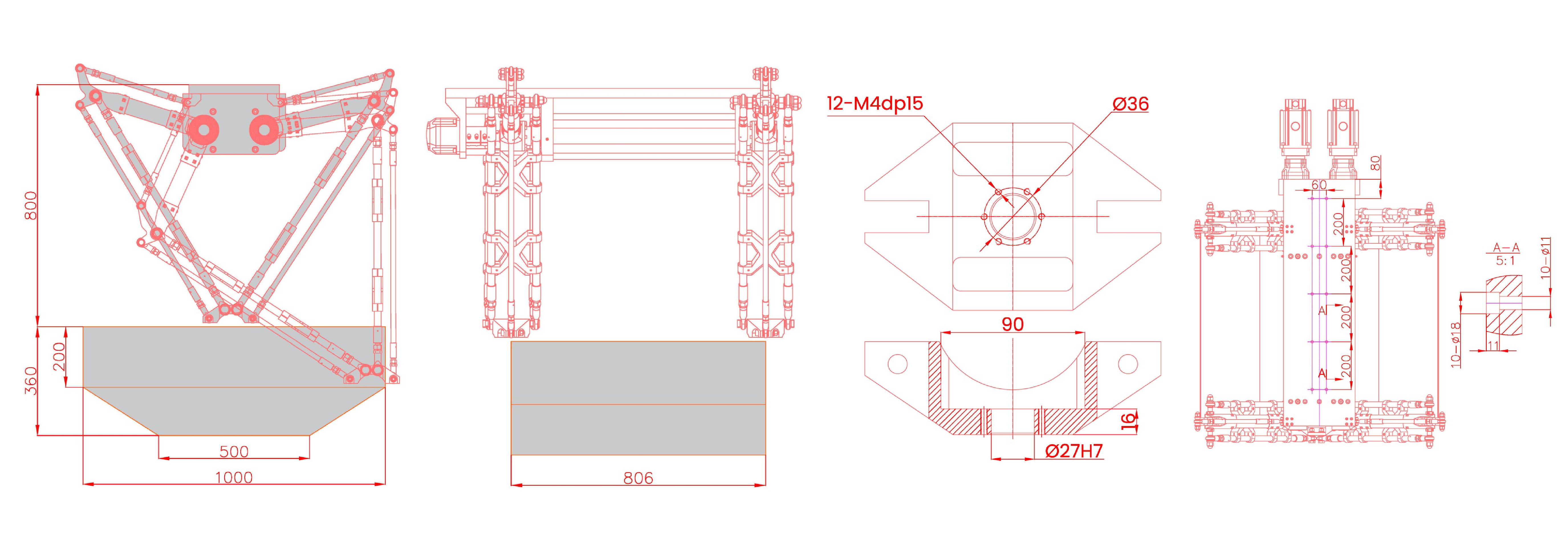
Disegnu di u produttu
Scrivite u vostru missaghju quì è mandate à noi